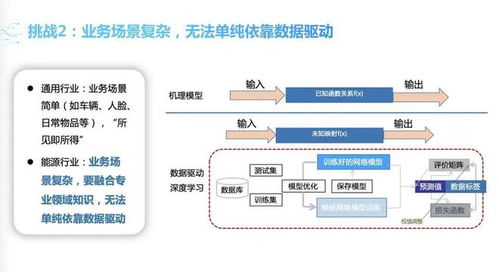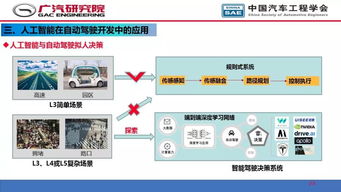
在当今科技浪潮中,自动驾驶无疑是备受瞩目的前沿领域,而人工智能正是驱动其发展的核心引擎。从感知环境到决策规划,再到控制执行,人工智能技术已深度渗透到自动驾驶开发的各个环节,并不断推动着这项技术从愿景走向现实。
在环境感知层面,人工智能,特别是计算机视觉和深度学习,赋予了车辆“眼睛”和“大脑”。通过摄像头、激光雷达、毫米波雷达等多传感器融合,系统能够实时采集海量环境数据。深度神经网络模型,如卷积神经网络,则负责对这些数据进行处理和分析,精确识别道路、交通标志、车道线、行人、车辆以及其他障碍物。这不仅要求极高的识别准确率,还需在复杂天气、光照变化及遮挡等挑战性场景下保持鲁棒性。例如,基于深度学习的语义分割技术可以将图像中的每一个像素分类,从而构建出车辆周围环境的精细化理解。
在决策与规划层面,强化学习和行为预测模型扮演着“智慧指挥官”的角色。车辆需要根据感知信息,预测其他交通参与者的意图和行为(如行人是否会突然横穿马路),并在此基础上规划出安全、高效、舒适的行驶轨迹。强化学习通过让智能体在模拟环境中不断试错、学习最优策略,为处理复杂的、多变的交通场景提供了强大工具。它能帮助车辆学会在交叉路口通行、变道超车、应对突发状况等高级驾驶任务,其决策过程正从基于规则的逻辑向更接近人类驾驶员的端到端学习演进。
在控制执行层面,AI算法确保车辆能够精准、平稳地执行规划好的轨迹。传统的控制理论(如PID控制)与机器学习方法相结合,可以优化油门、刹车和转向的控制指令,以适应不同的路况和驾驶风格,提升乘坐的舒适性和安全性。
人工智能的应用开发贯穿于自动驾驶的整个生命周期。庞大的数据是AI模型的“燃料”,因此高效的数据采集、清洗、标注和管理平台至关重要。在模型开发阶段,工程师们利用TensorFlow、PyTorch等框架进行算法设计、训练与优化。为了应对现实世界的“长尾问题”(即罕见但危险的场景),仿真测试平台利用AI生成海量的虚拟驾驶场景,极大地加速了系统验证和迭代的速度,降低了实车测试的成本与风险。通过OTA技术,经过优化和验证的AI模型可以持续更新到量产车辆上,实现功能的迭代升级。
挑战依然存在。AI模型的可解释性、在极端情况下的可靠性、以及相关的伦理与法律问题,都是当前研发的重点和难点。确保人工智能决策的透明、公平与安全,是赢得公众信任、推动大规模商用的关键。
人工智能不仅是自动驾驶的技术基石,更是其不断进化的动力源泉。从感知、决策到控制,AI的应用开发正推动着自动驾驶汽车从封闭测试区驶向开放道路,最终目标是创造一个更安全、更高效、更便捷的未来出行体系。这场由AI引领的交通革命,方兴未艾。